_banner_1200x275.jpg "EITP MOOC")
_banner_640x300.jpg "EITP MOOC")






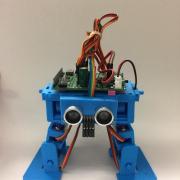
1. Components of the biped robot(两足机械人的组件)
Appearance of a 3D print biped robot(由3D打印机制作的两足机械人外观)
Please see more in the video (请看以下录像以获取更多资料):
https://www.youtube.com/watch?v=v6fhp-PBAvM
Component 1: Sensors(组件 1: 传感器)

A HC-SR04 ultrasonic sensor is used to detect distance.(HC-SR04超声波传感器是用来检测距离。)
The HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like bats do. It offers excellent non-contact range detection with high accuracy and stable readings in an easy-to-use package.(HC-SR04超声波传感器像蝙蝠一样利用声纳来确定物体的距离,它提供了一个既易用又具有高度准确和稳定读数的范围检测功能的非接触式组装。)
More information about HC-SR04 can be found at(下面连结提供更多关于HC-SR04的信息):
http://randomnerdtutorials.com/complete-guide-for-ultrasonic-sensor-hc-s...
Component 2: CPU(组件 2: 中央处理器)

An Arduino board was used as a CPU to control the robot.(使用Arduino电路板作为CPU来控制机械人。)
Arduino board senses the environment by receiving inputs from many sensors, and affects its surroundings by controlling lights, motors, and other actuators. (Arduino电路板通过接收来自许多传感器的信号来感测环境,并且通过控制灯,电机和其它致动器来活动。)
More inforamtion about Arduino can be found at(下面连结提供更多关于Arduino的信息):
Component 3: Servos for mechanical actions (组件 3: 伺服摩打用于机械动作)


Four Tower pro 9g Servo motors is used to control the mechanical actions of two legs.(4个Tower pro 9g伺服摩打用于控制两条腿的机械动作。
A Servo motor is a small device that has an output shaft. This shaft can be positioned to specific angular positions by sending the servo a coded signal. As long as the coded signal exists on the input line, the servo will maintain the angular position of the shaft. As the coded signal changes, the angular position of the shaft changes.(伺服摩打是具有输出轴的小型装置。通过向伺服摩打发送编码信号,该轴可以定位在特定的角度。 只要编码信号存在于输入在线,伺服摩打将保持轴的角度。)
More information about servo can be found at(下面链接提供更多关于伺服摩打的信息):
http://www.seattlerobotics.org/guide/servos.html
Component 4: Battery (组件 4: 电池)

Two 18650 Lithium-ion battery in parallel as the board with voltage step-up regulator is used to provide electrical energy.(用两枚配以电压升高调节装置的并联18650锂电池作提供机械人能源的底板。)
Component 5: Bluetooth UART for Andriod phone control(组件 5: 蓝牙UART用于Android手机控制)

A SPP-C Bluetooth UART or equivalent is used for external Andriod phone control. Bluetooth technology can be conceived as a wireless alternative to data cables by exchanging data using radio transmissions. (SPP-C蓝牙UART或等同物用于外部Android手机控制。蓝牙技术可以被认为是通过使用无线电传输交换数据来替代数据电缆的无线电。)
Component 6: 3D printed legs and body(组件 6: 3D打印的脚和机身)

Things files for 3D printing can be found at the link below(两足机械人的Thingiverse 3D打印参考档):
http://www.thingiverse.com/thing:1784367/#files
2. Instruction Guide on step by step assembling of a biped robot (两足机械人组装步骤说明书)
Instruction Guide on step by step assembling of a biped robot (两足机械人组装步骤说明书)



Click for Download: Installation guide.pdf
3. Instruction Guide on Design and Wiring (设计说明和接线指南)
Click for Download: Armor robot wiring.pdf
4. Video on the steps for assembly of a biped robot (关于装配两足机械人的步骤的视频)
5. Coding steps on programming a biped robot to move using App Inventor (使用App Inventor编程两足机械人移动的步骤)
Click for Download: workshop material.pdf
6. Notes on different play modes to control robot with Android phone(编码使用Android手机控制机械人的笔记)



7. Video on how to build a mobile app with App Inventor to control biped robot to move (关于如何使用App Inventor构建移动应用程序以控制两足机械人移动)
8. 'To infinity... and beyond!'('超越无限!')
Some more interesting video on possibility to use Arduino to make different kinds of robot for exploration.(一些关于使用Arduino探索做不同种类机械人的有趣视频。)
i). Top 10 Arduino Robot Projects(十大Arduino机械人项目):
https://www.youtube.com/watch?v=NZ6V63u_-D8
ii). HKU Computer Science MakeLab(关于香港大学计算器科学MakeLab): http://makerlab.cs.hku.hk/index.php/en/
iii). More information about the Biped Robot(关于两足机械人的更多信息): http://www.thingiverse.com/thing:1784367
iv). The Arduino code for Biped Robot can be found at(关于两足机械人的Arduino程序代码可以在以下网页找到):
